Ciutat
Acabamos la primera maqueta
Citilab
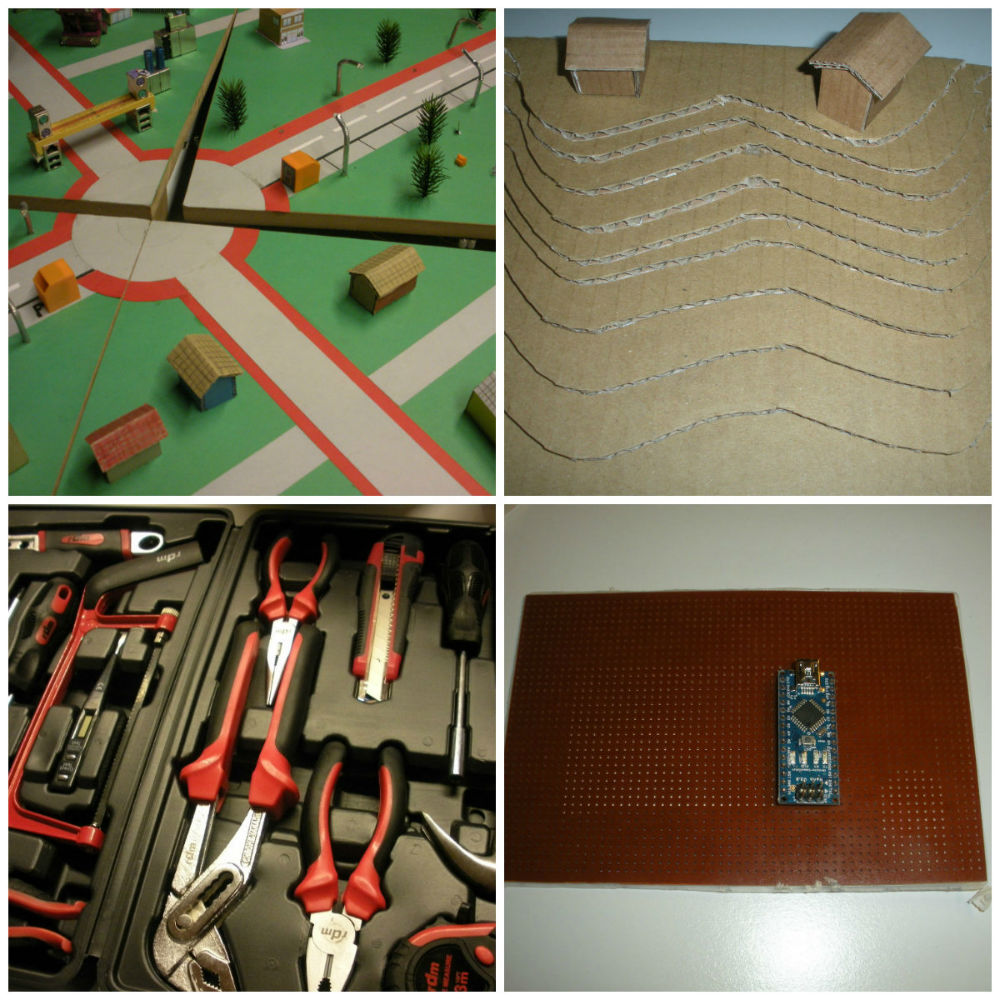
Para pegar las casas de madera con silicona hay que rascar la maqueta para que se fije mejor. El montaje electrónico esta casi acabado. Las farolas llevan un potenciometro para poder variar la referencia de la iluminación. Por eso hay que utilizar el taladro para colocarlo centrado en la maqueta para usar menos cable. El panel solar sera desmontable y la estación de reciclaje sera fija. En una caja a parte guardaremos algunos elementos: coches, muñecos, tapas containes, etc. En la montaña hay que utilizar el taladro para colocar un jacks del molino viento y se utiliza de interruptor. Nos han encargado otra maqueta de la ciudad inteligente.