Radio capilla
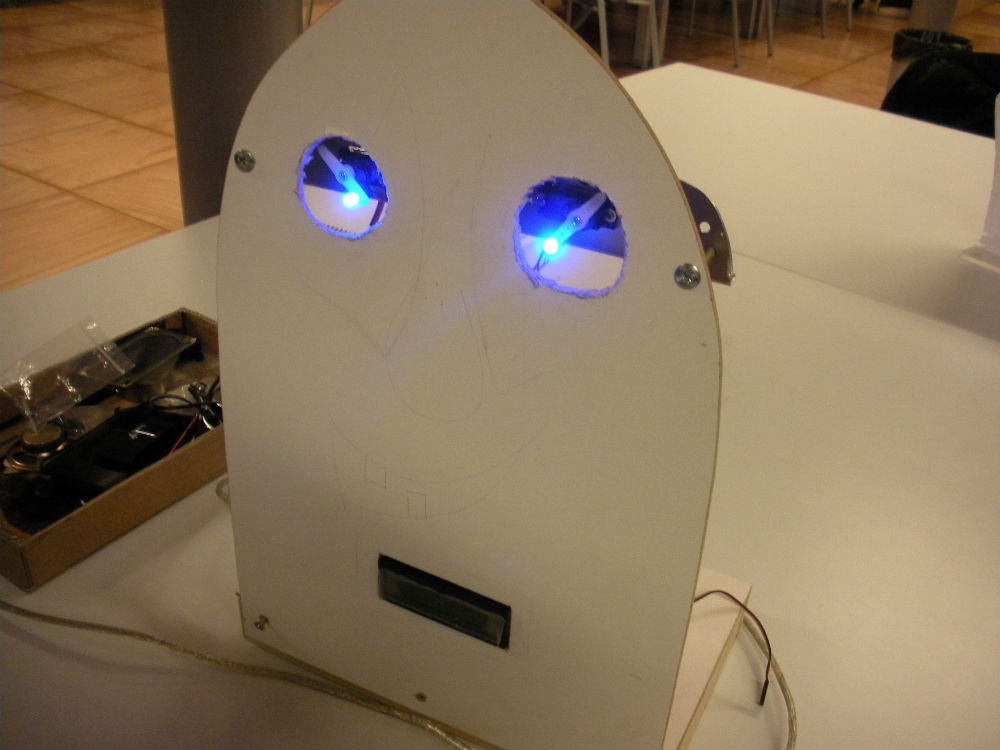
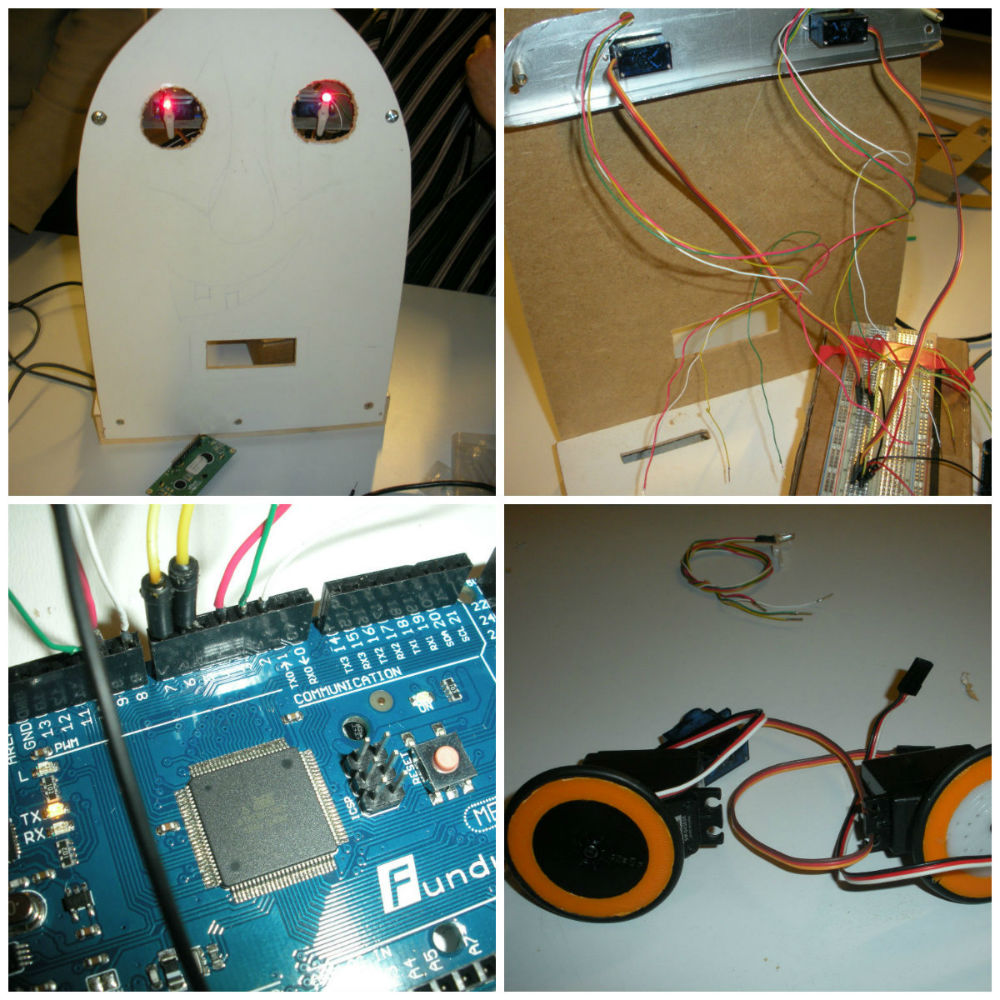
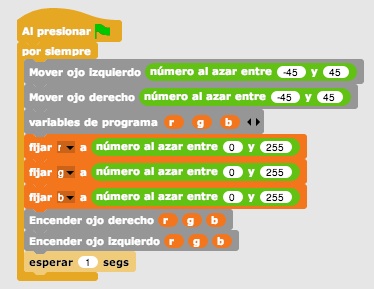
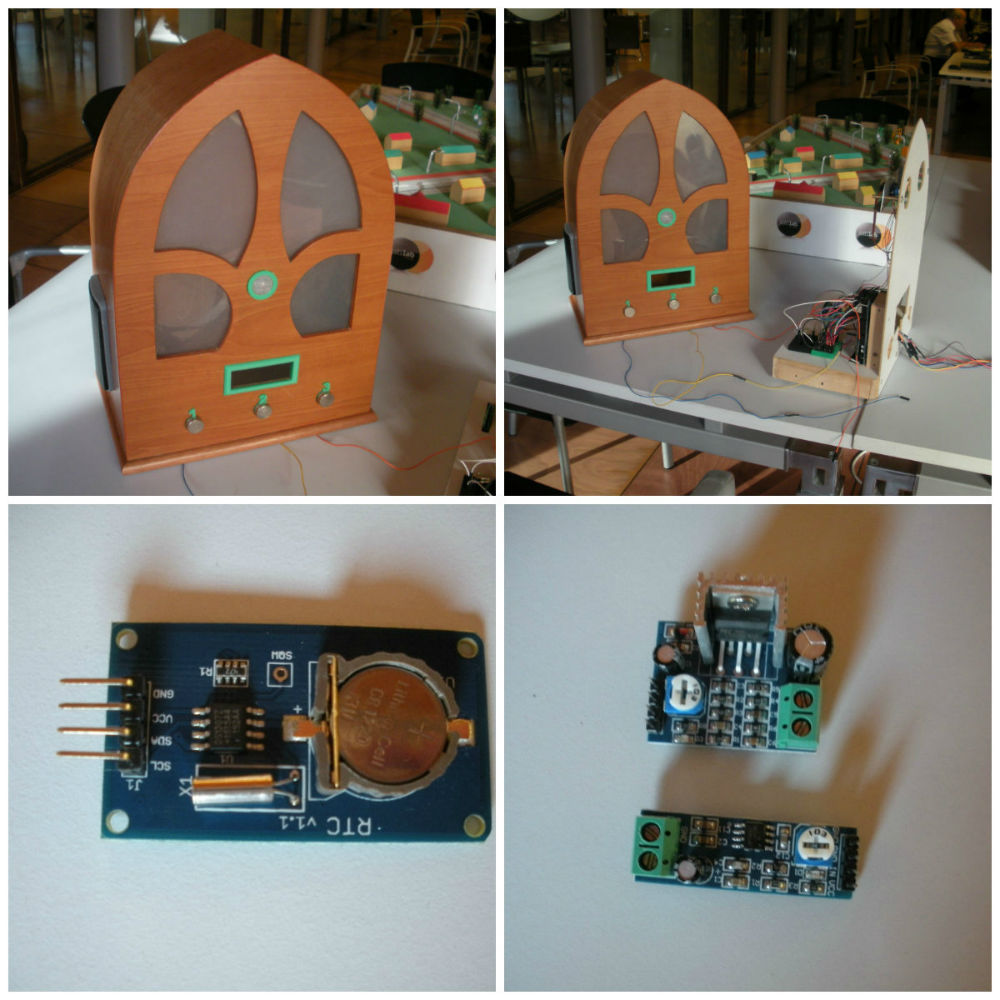
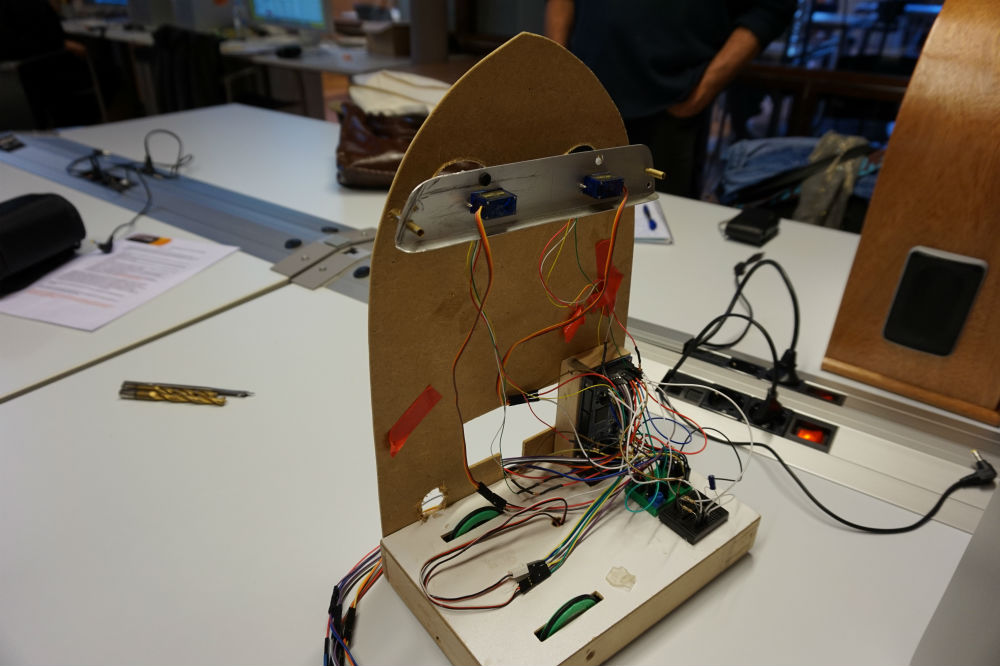
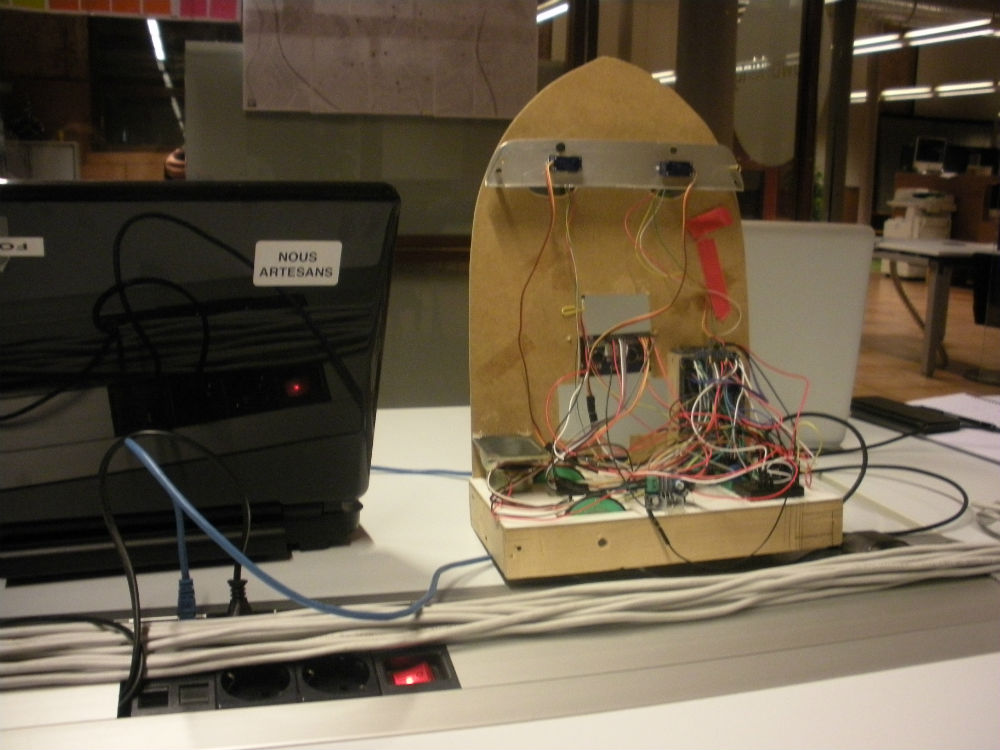
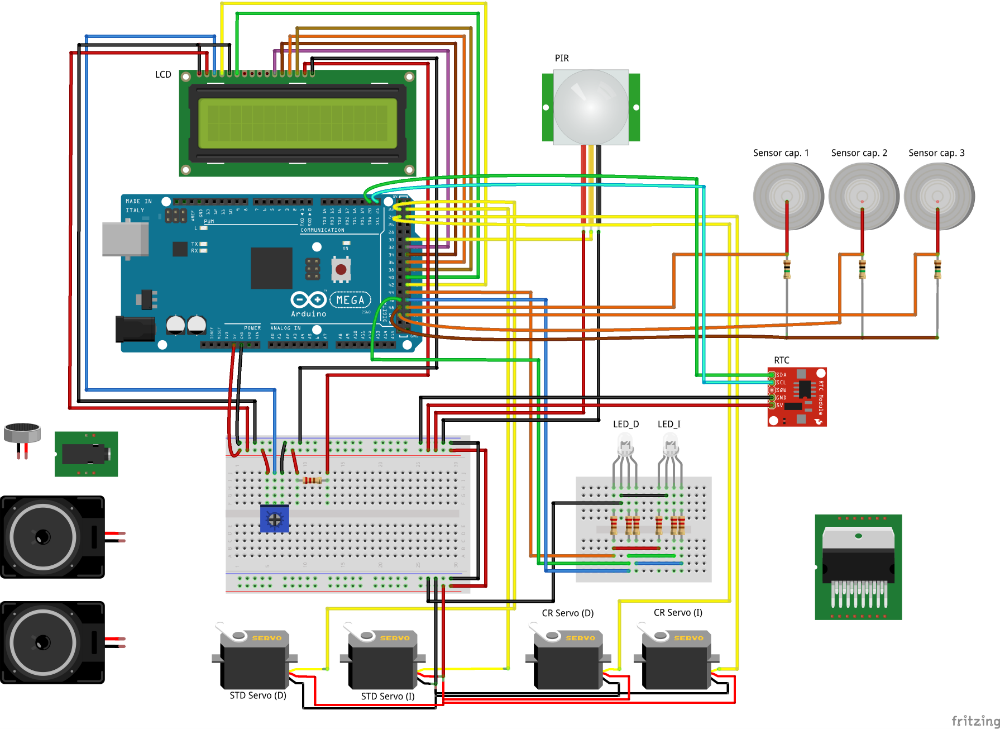
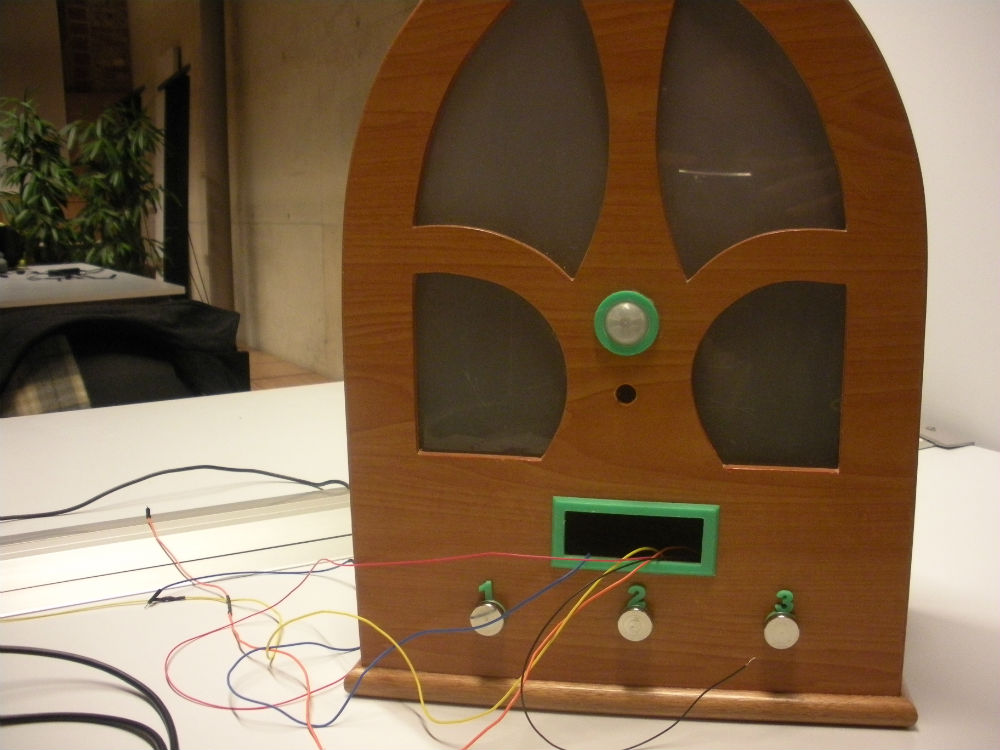
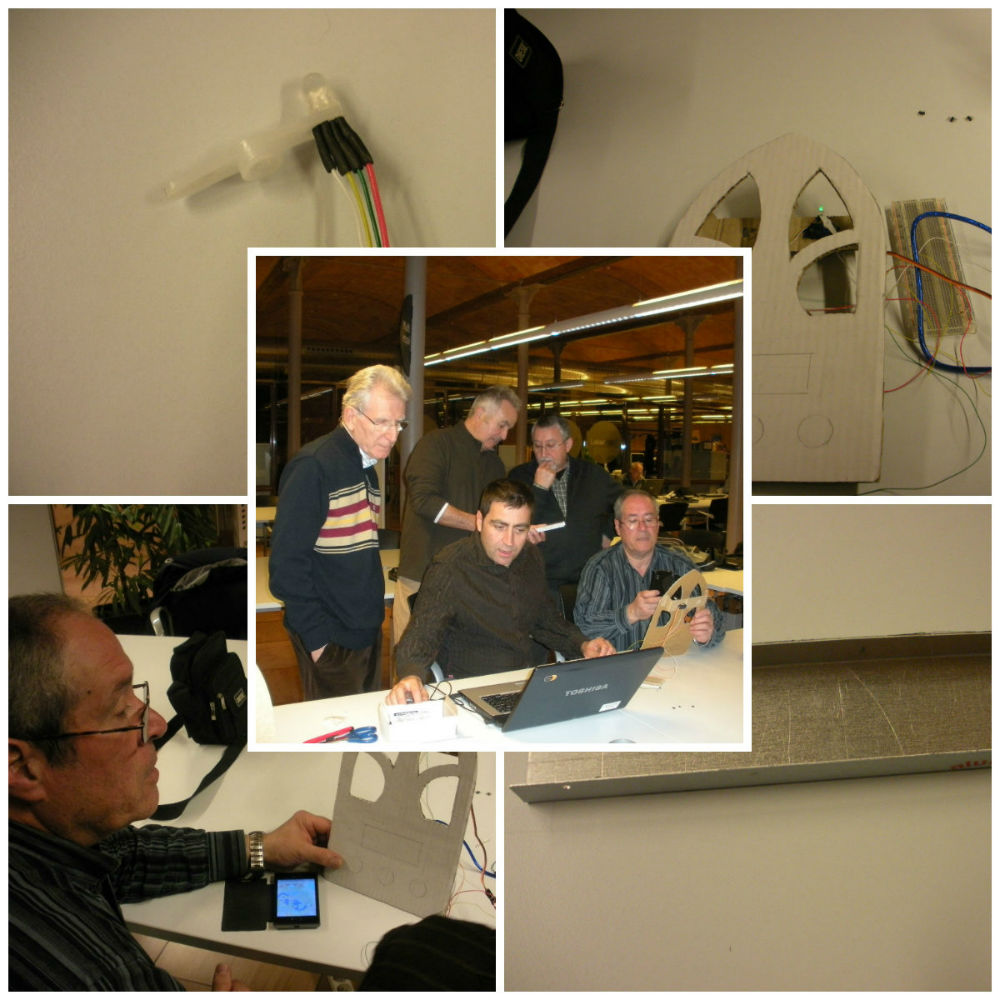
Construiremos el robot imitando una radio capilla de madera. Colocaremos un sistema de bolas y motor si queremos que se mueva en cualquier dirección. Este sistema quedara oculto debajo. Nuestro robot tendrá una batería recargable o conectado a la red, por eso con un cable los movimientos son limitados. Si detecta alguna persona se mueve y saluda. Cada cierto tiempo hará un pequeño movimiento para atraer a la gente. Muelles que hagan de brazos que se muevan y colocaremos un sensor para tocar cuando termine su reclamación o queja o petición o otros. Dos luces que hagan de ojos. Leds RGB que pueden reproducir cualquier color, por ese motivo cambiara de color continuamente. Con un motor de angulo podremos mover los ojos en cualquier angulo. Primero haremos un prototipo de cartón. En una tira de letras aparecerá el numero de reclamación o queja o petición o otros para poder identificar a cada persona. Una idea es que nos de el tiket con el numero de reclamación o queja o petición o otros. Necesitamos para nuestro robot: Grabadora y reproductor de MP3. Sistema de bolas y motor. Leds RGB. Detector de presencia. Sensor de proximidad. Muelles. Motor de angulo. Impresora de tikets. Sensores. Batería recargable.